最优化算法速通 - 线性规划
标准型
- 约束集:
是凸多面体, 多胞形 - 凹函数在凸集上的极值点一定是集合的边界点, 线性规划的极值点一定是多胞形的顶点
- 解的存在性
- 可行域为空集, 无最优解
- 可行域为有界闭集, 最优解不唯一
- 可行域为无界集, 不确定有无最优解
线性规划标准型:
其中
化为标准型:
- 最大化转化为最小化相反数
- 不等式约束引入松弛变量化为等式约束 (确保不等式只需大于等于0, 同时反转不等号方向)
- 决策变量属于实数
时, 对分量进行非负拆分 则两侧同乘 -1
线性规划的解
其中
从
- 在
下的基本解: 是 的一个解 - 基变量:
中的元素 - 基本列向量:
中的列向量 - 退化的基本解:
中有变量是 0 - 可行解: 满足约束条件
- 基本可行解:
- 可以通过暴力枚举
(要保证 可逆)的方法求所有基本可行解 - 最多有
个基本解
- 可以通过暴力枚举
- 退化的基本可行解
- 最优可行解: 满足约束条件且使得
取得极小值
线性规划基本定理:
- 存在可行解
存在基本可行解 - 存在最优可行解
存在最优基本可行解
则可以通过搜索有限数量的基本可行解来求解线性规划问题. 但直接枚举复杂度很高, 需要更好的做法
解的性质:
- 基本可行解
非零分量对应的列向量组线性无关 在可行域的顶点处取得 - 最优解一定在可行域的顶点处取得
单纯形法
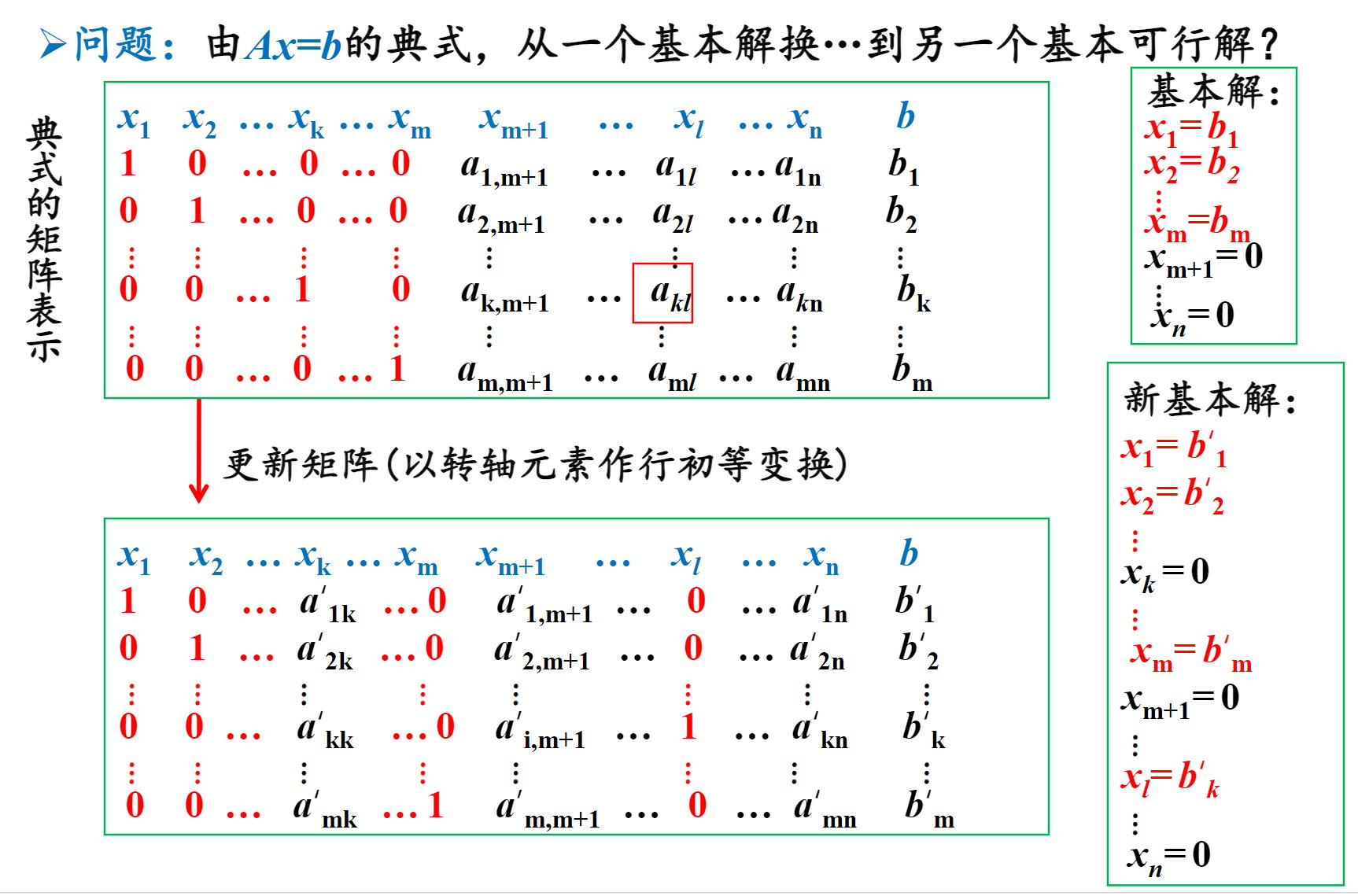
从某个基本可行解变换到另一个基本可行解, 直到找到最优基本可行解.
转轴元素
行的选择: 希望能保证变换后
这样能使得
判断解的最优性
设
- 若
, 则为基本可行解, , 目标函数值: - 若
, 则 . 定义 , 则目标函数值
则
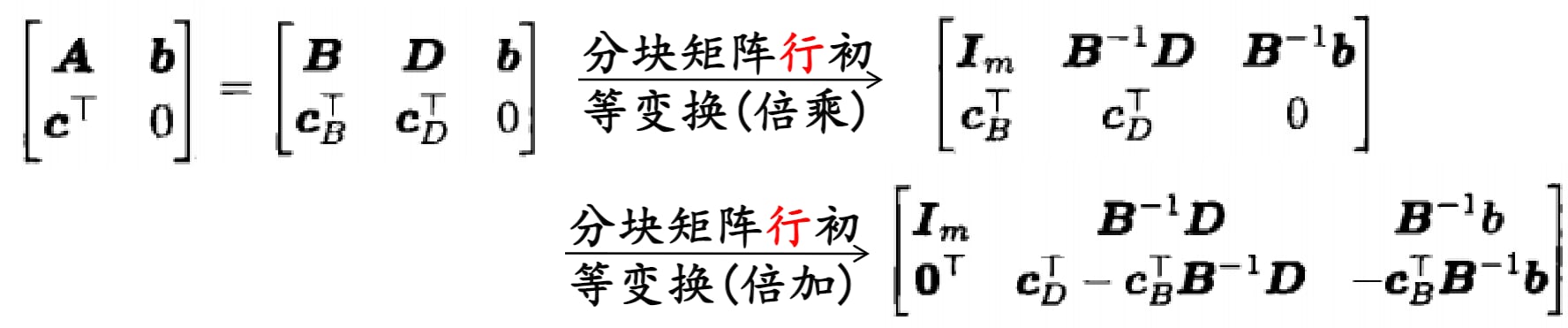
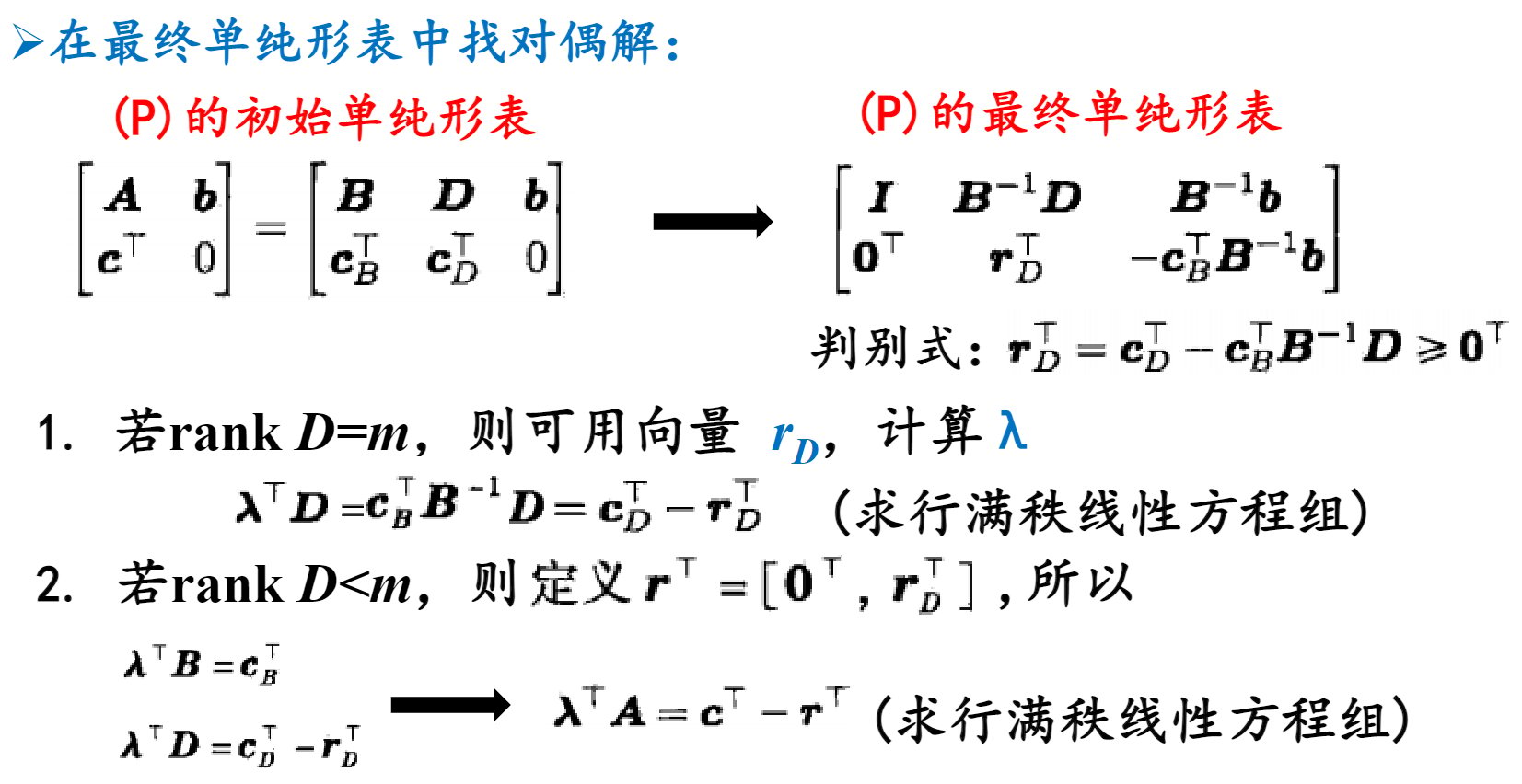
单纯形表的矩阵表示
线性规划的基、基变量、基本可行解、判别式、函数值都在最后一个矩阵中.
将初始单纯形表转化为标准单纯形表, 需要做行初等变换使得基变量所在列的判别式值为 0, 然后进行单纯形表的操作:
- 若上述矩阵中的判别式全部非负,则此时的基本解就是最优解,最优值的相反数在矩阵的右下角
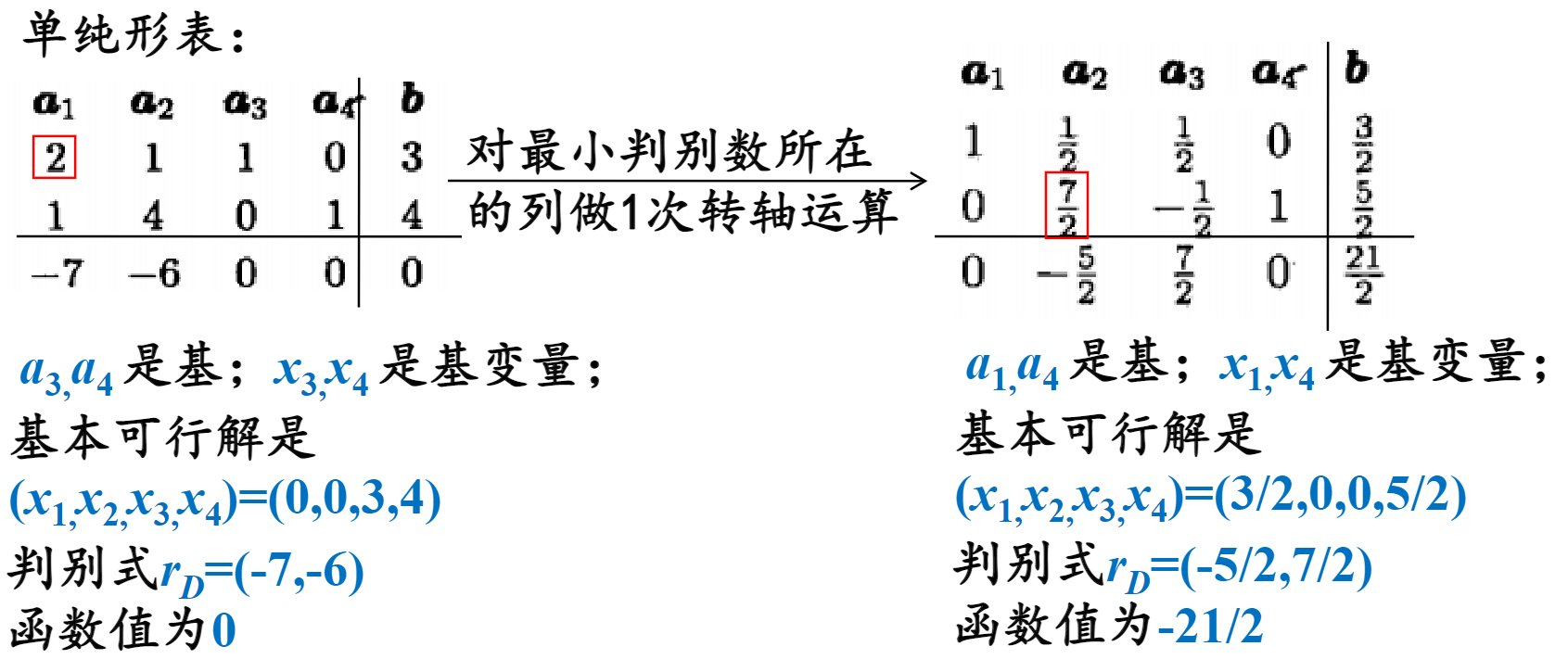
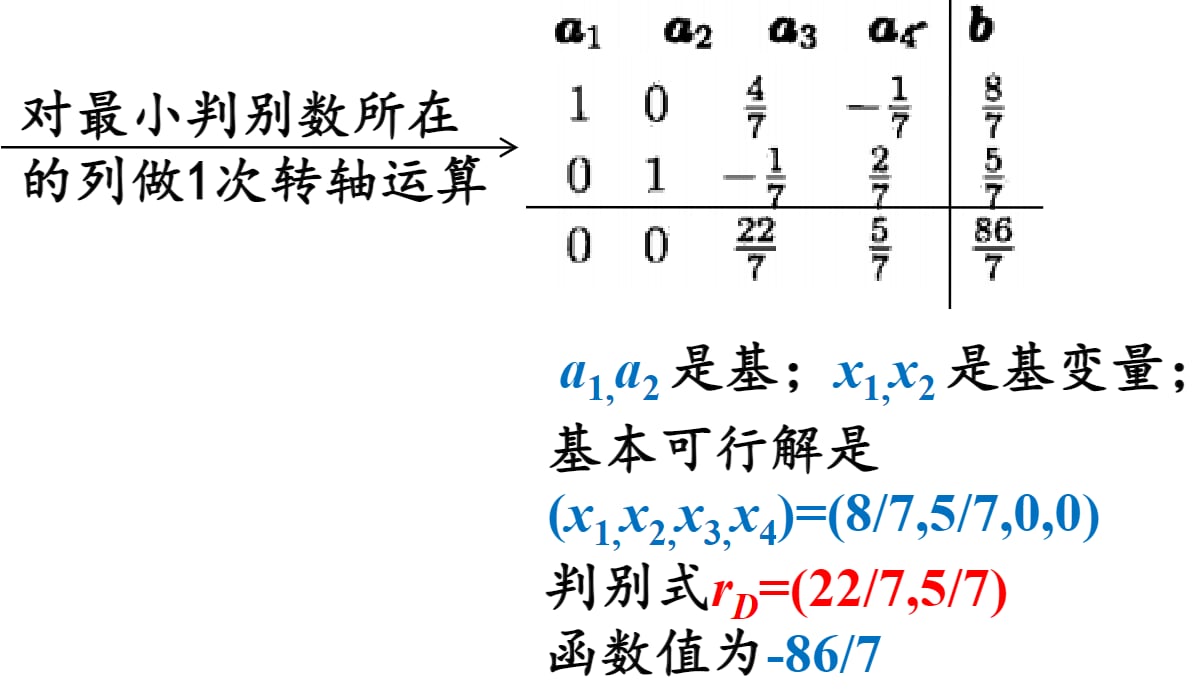
- 若上述矩阵中的判别式有负元素,则取最小的负元素所在的列进基,做1次转轴运算, 同时通过行初等变换更新判别式的值
例子:
确定初始可行基
有些明显的初始可行基可以直接看出来, 有的不行, 穷举
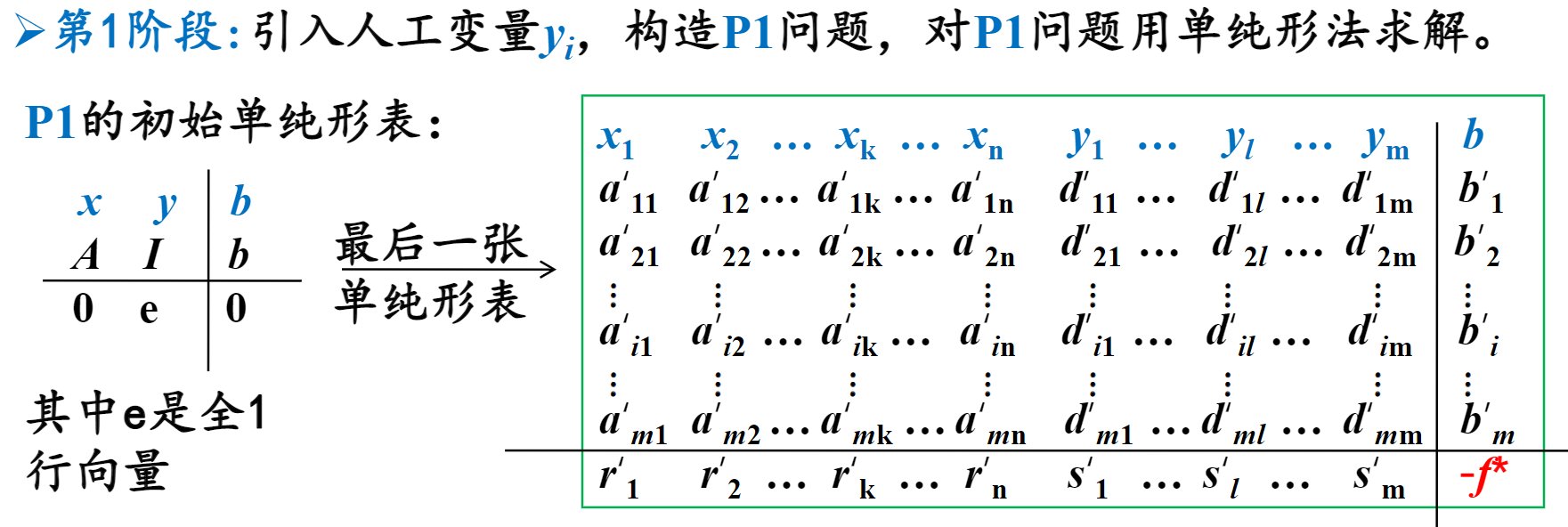
两阶段法
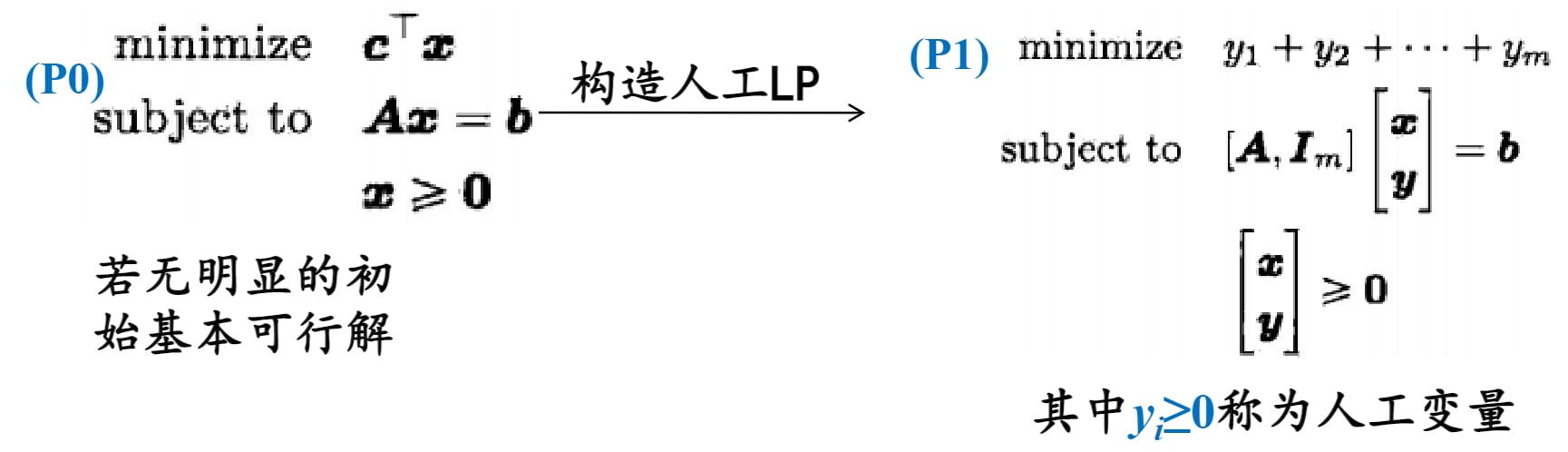
P0 有基本可行解
- (第一阶段) P1 初始时基变量全部位于人工变量中, 基变量的判别式均为 1
- 通过行初等变换化为标准单纯形表, 使得基变量的判别式为 0
- 做转轴变换直到求出最优解
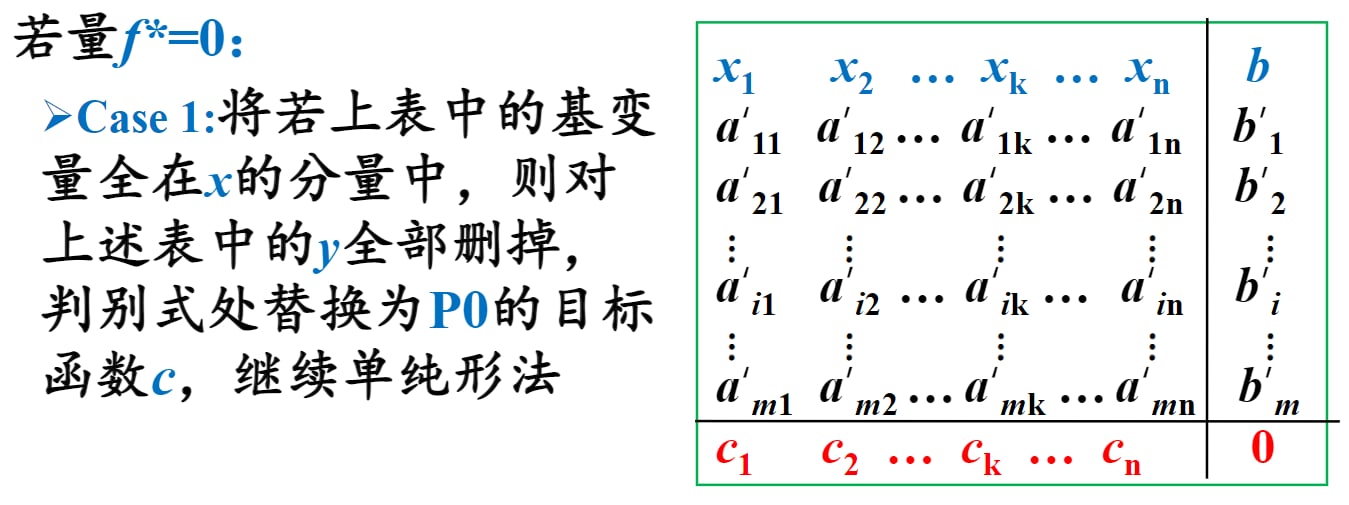
- 若最优解不为 0 则无解
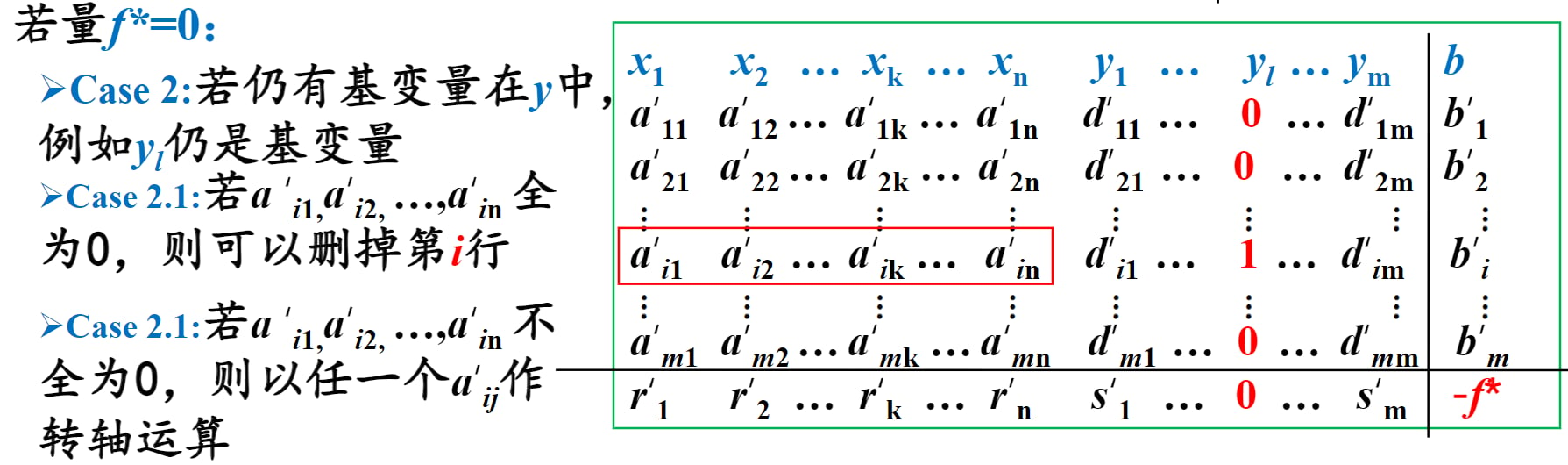
- 若有基变量在人工变量中
- 若这一行
, 则直接删除行 - 否则任选一个非零
做转轴变换使得人工变量出基
- 若这一行
- 删除人工变量的列
- (第二阶段) 根据最小判别数不断做转轴运算求最优解.
若
大 M 方法
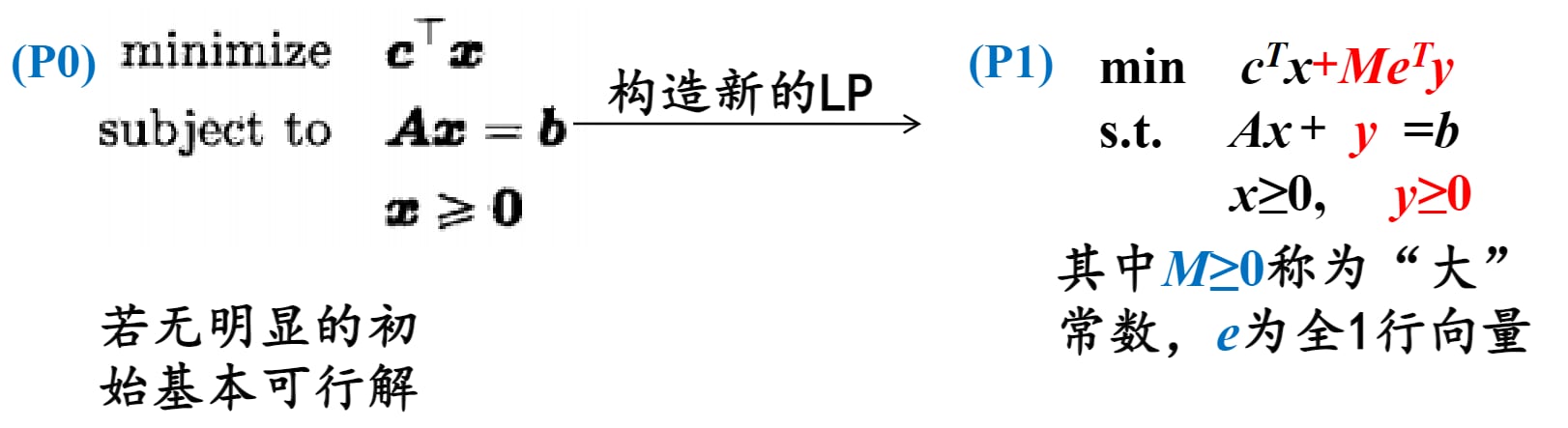

加入至多
对偶线性规划
原问题 (P):
对偶问题 (D):
- 弱对偶定理:
原问题可行解, 对偶问题可行解, - 若
, 则 和 是各自问题的最优解 - 如果 (P) 问题有最优解,那么 (D) 问题也有最优解,并且它们的最优函数值相同
互补松弛定理: 可行解






