理论力学速通 - 刚体力学
- 刚体: 没有形变的物体
- 物体中任意两点距离永不改变
- 计算能力, 动量, 角动量不考虑内力, 一切内力可忽略
- 自由度: 3 平动 + 3 转动
- 刚体上二力平衡: 等大反向共线
- 滑移矢量: 刚体上的力可沿力线任意滑动
- 若要把刚体上的力移到任意点, 需要加上新的力偶, 力偶矩等于移动前的力对指定点的力矩
- 力偶: 一对等大, 反向, 不共线的力, 不影响平动
- 力偶对以任意点为参考点, 力偶矩均为
- 刚体上的力可以沿任意点简化
- 主矢:
- 主矩:
- 主矢:
- 刚体平衡条件: 主矢主矩均为零
- 汇交力系: 若所有力过同一点, 则主矩为零, 只用计算主矢
- 平面力系: 在
平面上, 则只用求 - 三力平衡: 要么三力共点, 要么平行
- 以下条件等价
- 三力能被一力代替
- 存在一点主矩为零
- 任意一点主矢垂直于主矩
- 以下条件等价
- 刚体平衡问题可能是超静定问题 (未知数多于方程数), 此时无唯一解, 刚体模型不适用, 必须考虑物体的形变
- 刚体的运动
- 平动
- 定轴转动
- 定点转动
- 平面平行运动 (滚动): 任意一点始终在平行于固定平面的平面内转动
- 一般运动
转动的描述
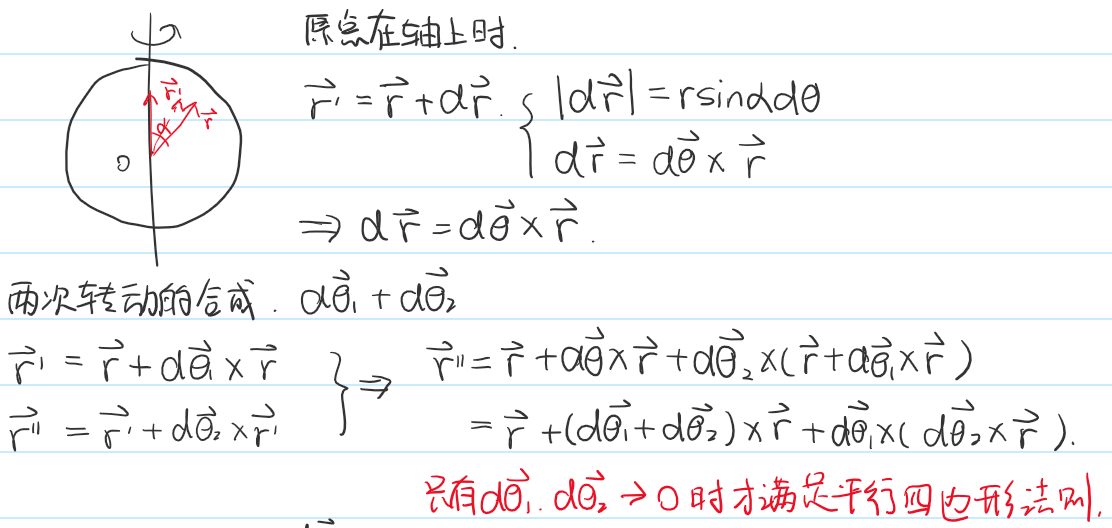
- 角位移: 大小为绕轴转过的角度, 方向与转过角度成右手关系
原点在轴上 - 不满足平行四边形法则, 不是矢量

- 角速度矢量
原点在轴上 - 对所有参考点, 角速度都是相同的
- 角加速度矢量
- 对所有参考点, 角加速度都是相同的
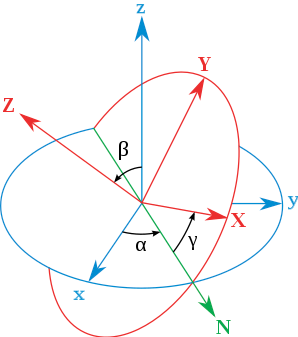
欧拉角
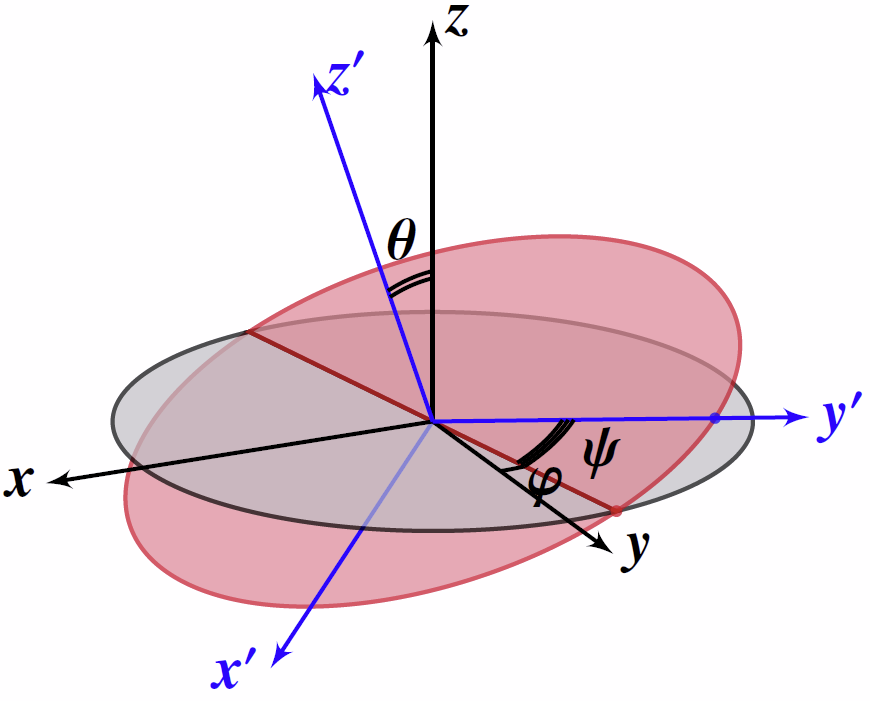
按顺序, 依次旋转:
- 进动角
: 绕 轴, 轴转向 轴 - 章动角
: 绕 轴, 轴转向 轴 - 自转角
: 绕 轴, 轴转向 轴
动系中
静系中
定点转动
绕质心转动方程
绕固定轴的转动惯量 (考虑每个点到轴的距离)
希望能计算绕任意固定轴 (方向角
存在一个方向, 可以相似对角化惯量张量
- xOy 平面对称,
- 绕 x 轴中心对称
角动量
转动动能
静系下定点转动动力学方程
欧拉动力学方程 (动系中)
定轴转动
绕 z 轴转动, 角动量定理
垂直轴定理: xOy 平面上的平面物体绕 z 轴的转动惯量等于绕 x 和 y 轴的转动惯量之和.
平面平行运动
刚体上任意点的速度: 基点的速度与相对基点的转动速度的矢量和
这个公式中, 基点的选取可以是任意的
刚体上任意点加速度: 基点加速度和相对于基点转动加速度的矢量和
转动瞬心: 某一时刻平面上的某一点的速度为零
- 刚体上任选两点,若它们的速度方向不平行,则通过两点作速度的垂线,交点即为转动瞬心
- 如果两点的速度的垂线相互平行,且不重合,则可以认为它们的点在无限远处,即无限远处为瞬心。此时刚体作平动
- 如果两点的速度的垂线重合,且大小相等,方向相同,则无限远为瞬心。此时刚体作平动
- 如果两点的速度的垂线重合,且大小不等,此时作两速度矢量的末端的连线,它与垂线的交点即为瞬心
若刚体上三个质点的速度恒相同, 则刚体只能做平动
许可协议
本文采用 署名-相同方式共享 4.0 国际 许可协议,转载请注明出处。
分享文章




